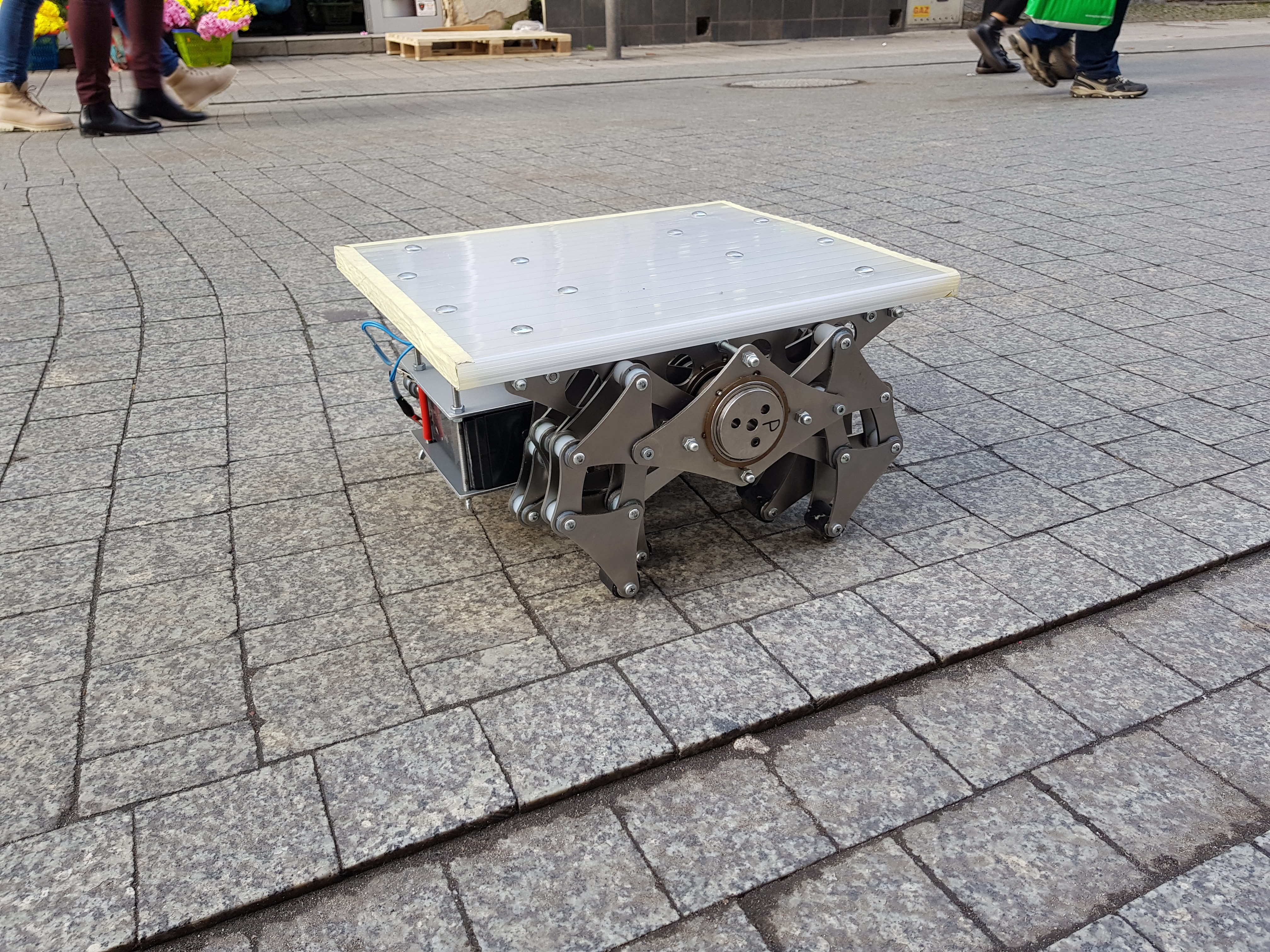
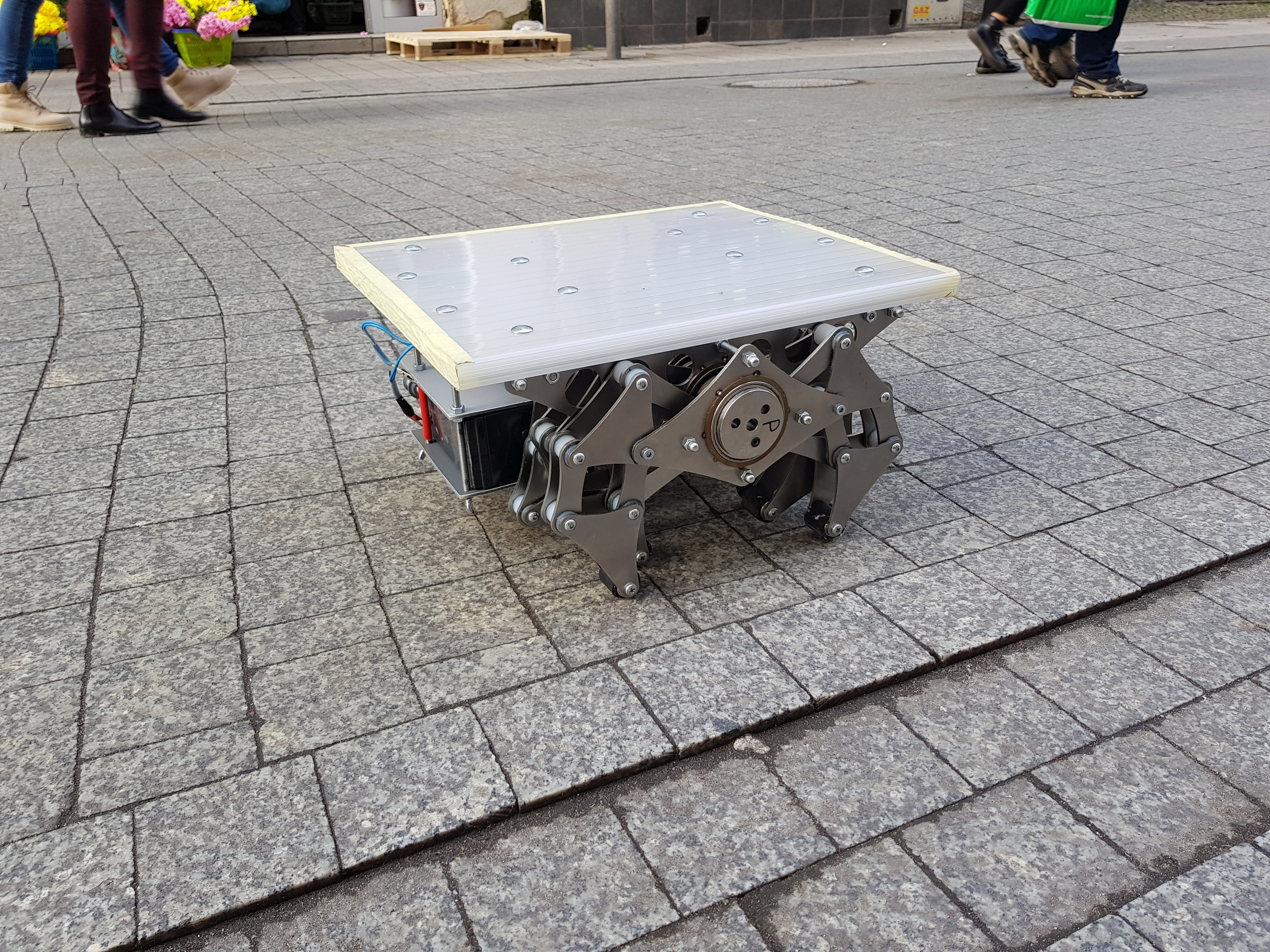
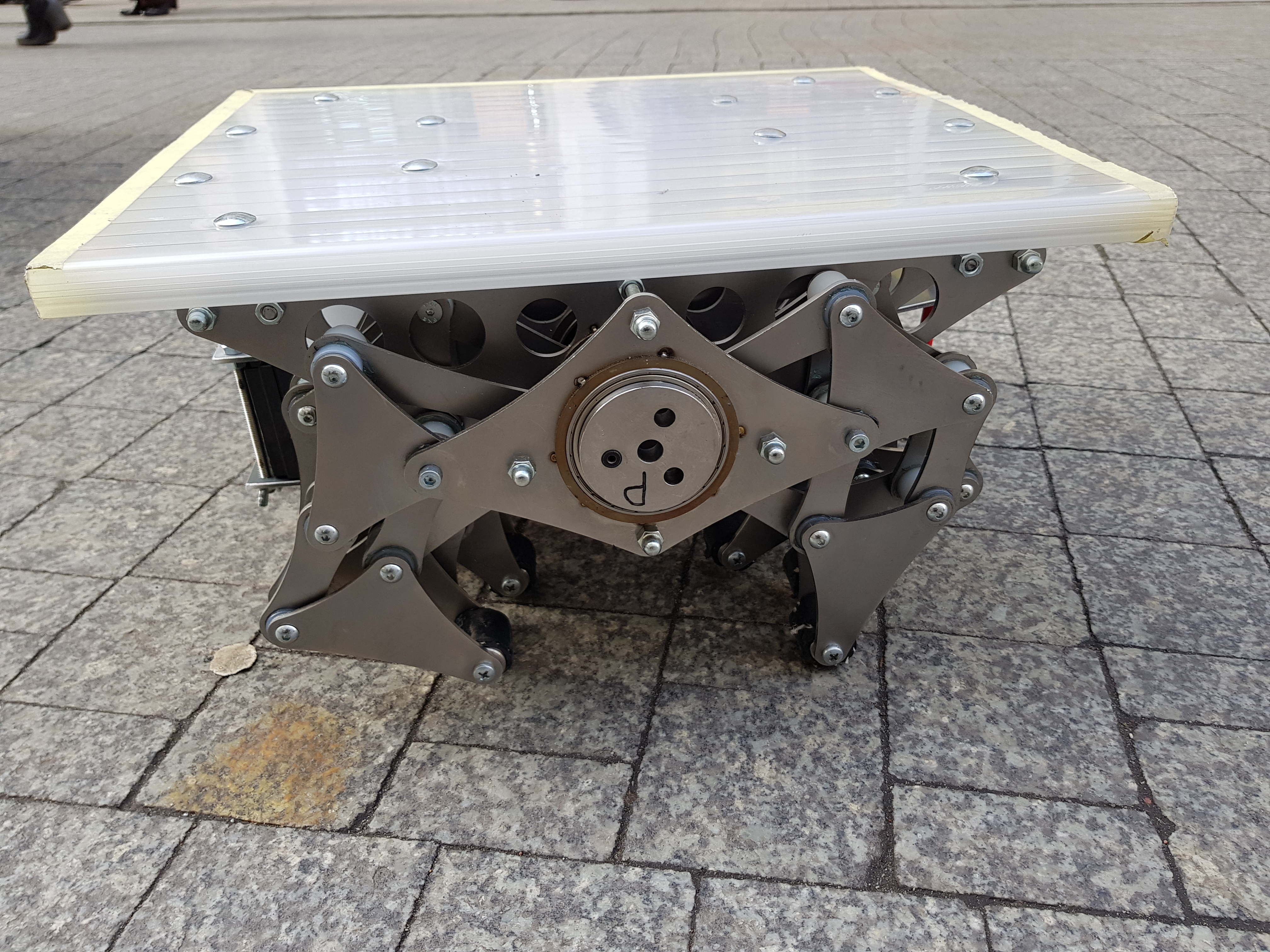
Robot Kroczący
Demonstracyjny Robot skonstruowany w oparciu o mechanizm Theo Jansena. Kinetyczny mechanizm kroczący napędzany dwoma silnikami o mocy 120W każdy z radiowym sterowaniem bezprzewodowym dającym pełną niezależną kontrolę nad obydwoma silnikami z możliwością regulacji kierunku i prędkości każdy. Elementy robota zostały wykonane z laserowo ciętej stali kwasoodpornej o grubości 3 mm oraz części toczonych i frezowanych. Sterowaniu w oparciu o mikrokontroler i moduł radiowy. Udźwig robota 150kg, prędkość 10 cm/s czas pracy na jednym komplecie akumulatorów 1 godzina, zasięg sterowania 4 km Części mechaniczne zostały zaprojektowane i przetestowane w programie fusion 360.